Roll-O-Matic
Was tun, wenn die originalen Steuergeräte der Dachfenster-Rollläden nach einem Stromausfall ständig erneut miteinander gekoppelt werden müssen? Am besten eine neue Steuerung bauen. Weiterer Vorteil: die ist dann auch smart!
Der alte Aufbau
Bevor Roll-O-Matic als zentrale Steuerung aller 8 Dachfenster-Rollläden eingerichtet wurde, war folgender Aufbau in Betrieb: die Leitungen der 8 (potentialfreien) Wandtaster in den Räumen waren an einem Punkt auf dem Dachboden gesammelt, dort gab es für jeden Taster ein "Eingangsmodul", welches nur dazu diente, einen Taster-Druck zu erkennen. Die "Eingangsmodule" waren dann über Funk mit den eigentlichen "Steuergeräten" der Motoren verbunden - davon ebenfalls 8 Stück. Und eben diese Funkverbindung zwischen den Eingangs- und Antriebsmodulen war nach einem Stromausfall oft entkoppelt, was einen mühseligen Gang auf den Dachboden erforderlich machte, wo man dann in entweder viel zu kalter, oder saunaähnlicher Umgebung Zeit damit verbringen durfte, die Module zurückzusetzen und neu zu koppeln, bevor wieder alles funktionierte.
Idee für Roll-O-Matic
Diese Problematik und die fehlende Anbindung an das bestehende Smart-Home-System haben dann die Entwicklung von Roll-O-Matic in Gang gesetzt. Meine Idee war es, ein einziges Steuergerät zu entwickeln, das alle 8 Taster auslesen und alle 8 Motoren ansteuern kann.
Die Motoren der Dachfenster-Rollläden wurden vom originalen Antriebsmodul durch ein auf die Spannungsversorgung moduliertes digitales Signal gesteuert. Da das zugehörige Protokoll natürlich nicht öffentlich ist, musste eine andere Lösung her. Durch Recherche bin ich auf die Möglichkeit gestoßen, die Motoren durch eine simple Polumkehrsteuerung zu kontrollieren, wobei das erst möglich ist, nachdem diese vom originalen Steuergerät durch eine Reset-Prozedur getrennt werden. Außerdem musste ich dafür sorgen, dass das Datensignal der Motoren herausgefiltert wird, da sich diese sonst gegenseitig "erkennen" und ihren Dienst verweigern, wenn sie über das gleiche Netzteil versorgt werden und dadurch quasi verbunden sind. Die Motoren schalten sich selbstständig ab, sobald sie ihre Endpositionen erreichen.
Die Anbindung der Taster ist eine einfachere Aufgabe: da diese potentialfrei sind, können sie quasi direkt an mein neues Steuergerät angeschlossen werden.
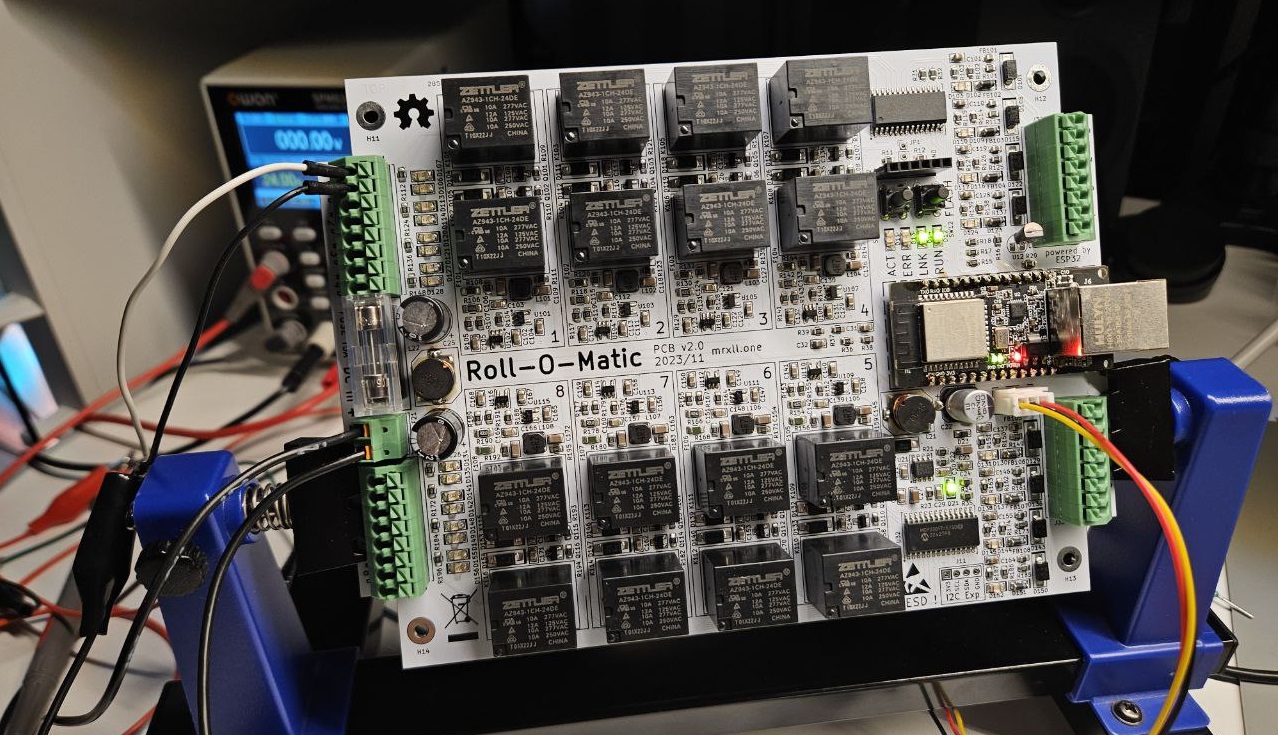
PCB-Design
Als erstes habe ich eine Platine auf Basis des ESP8266 entwickelt und aufgebaut. Hardwareseitig funktionierte diese auch gut und Tastendrücke wurden erkannt und die Motoren entsprechend angesteuert. Als Software kam Tasmota zum Einsatz. Doch leider ist der ESP8266 in seinen Ressourcen begrenzt, sodass Tasmota auf dieser Plattform bloß 4 Rollladen-Komponenten ermöglicht. Das ist natürlich nicht genug...
Deshalb habe ich eine zweite Version der Platine auf ESP32-basis entworfen und gebaut. Dafür kam ein ESP32-Modul mit eingebautem Ethernet-Anschluss zum Einsatz und so war die software-seitige Umsetzung der Steuerung kein Problem mehr.
Features
Roll-O-Matic bietet folgende Features:
- 8 frei konfigurierbare Tastereingänge
- 8 Ausgänge für Rollladenmotoren mit 24V-Polumkehrsteuerung, jeweils mit Sicherung
- Ethernet-Anschluss und WiFi zur Netzwerkanbindung
- zwei Temperatur- bzw. Luftfeuchtesensoren
- Strommessung pro Rollladen, um "Aktivität" zu erkennen
- Software: Tasmota für Kalibrierung, Steuerung und Einbindung in verschiedenste Smart-Home-Systeme
Einsatz
Roll-O-Matic wurde zusammen mit einem 24V-Netzteil in ein passendes Gehäuse auf dem Dachboden verbaut und verkabelt. Nach der Kalibrierung der einzelnen Rollläden funktioniert das System seitdem zuverlässig und ohne Probleme.
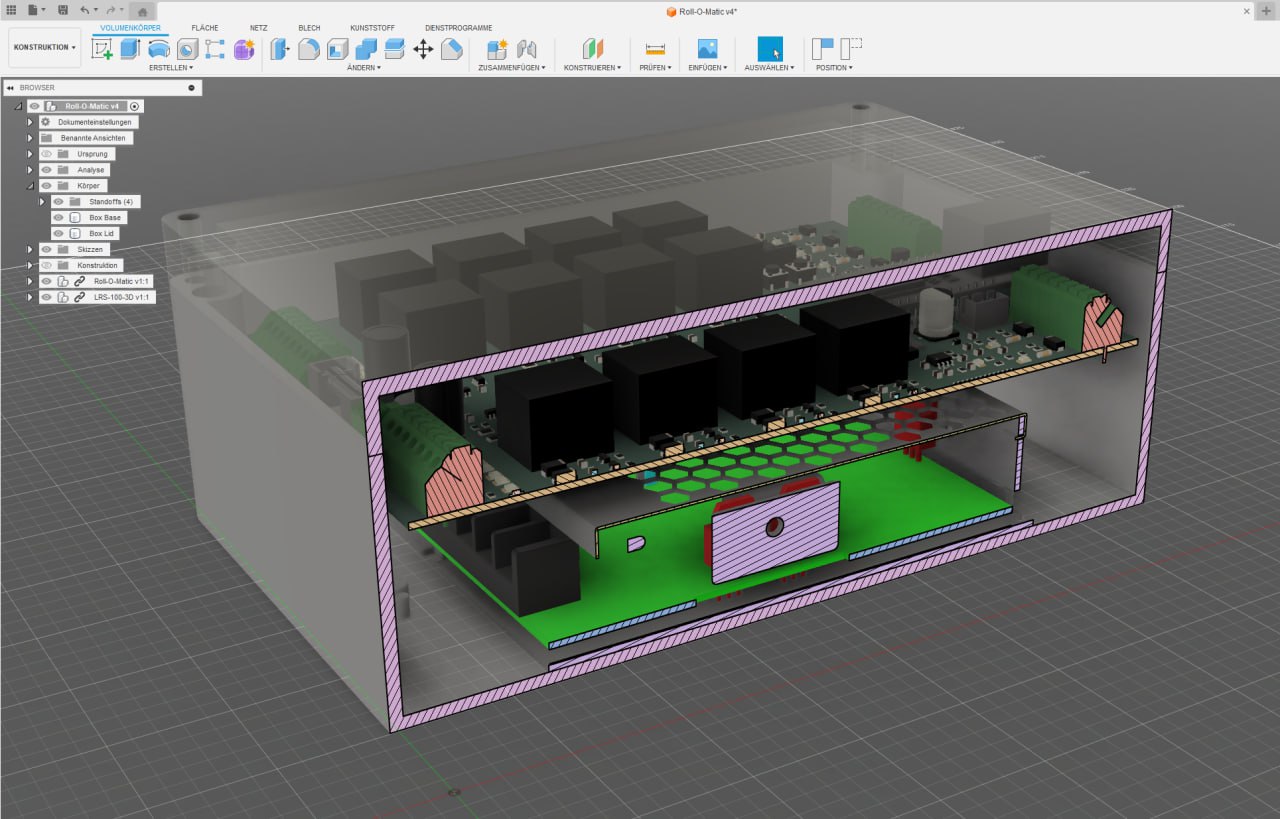 Schnittanalyse des 3D-Modells von Roll-O-Matic im Gehäuse mit einem 24V-Netzteil.
Schnittanalyse des 3D-Modells von Roll-O-Matic im Gehäuse mit einem 24V-Netzteil.